Friday, February 09, 2007
Wednesday, September 20, 2006
Bloomy Experiment
Tuesday, June 13, 2006

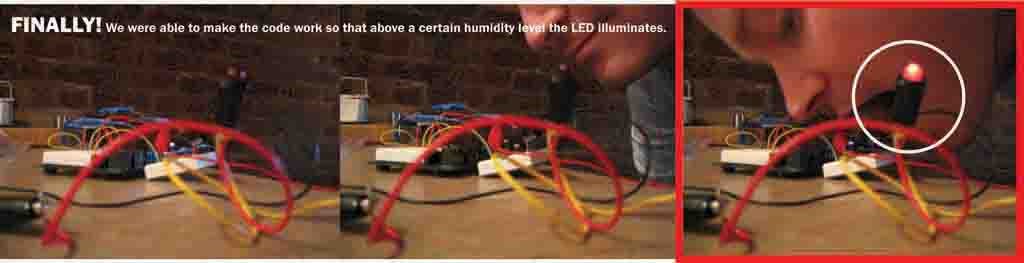
door dynamo diagram
by
carmen trudell & jenny broutin
Tuesday, May 09, 2006
Tuesday, May 02, 2006
Here is code to make 8 sensors and 8 Flexinol wires work simultaneously:
'{$STAMP BS2}
'{$PBASIC 2.5}
DIR0 = 1
S0 VAR Bit
DIR2 = 1
S2 VAR Bit
DIR4 = 1
S4 VAR Bit
DIR6 = 1
S6 VAR Bit
DIR8 = 1
S8 VAR Bit
DIR10 = 1
S10 VAR Bit
DIR12 = 1
S12 VAR Bit
DIR14 = 1
S14 VAR Bit
Start:
FREQOUT 0,1,38500 'sends out signal to IR LED
S0 = IN0 'Stores reply
DEBUG 0,"SENSOR0 = ",DEC S0, CR 'displays the
results
IF S0 = 0 THEN
HIGH 1
ENDIF
FREQOUT 2,1,38500 'sends out signal to IR LED
S2 = IN2 'Stores reply
DEBUG 2,"SENSOR2 = ",DEC S2, CR 'displays the
results
IF S2 = 0 THEN
HIGH 3
ENDIF
FREQOUT 4,1,38500 'sends out signal to IR LED
S4 = IN4 'Stores reply
DEBUG 4,"SENSOR4 = ",DEC S4, CR 'displays the
results
IF S4 = 0 THEN
HIGH 5
ENDIF
FREQOUT 6,1,38500 'sends out signal to IR LED
S6 = IN6 'Stores reply
DEBUG 6,"SENSOR6 = ",DEC S6, CR 'displays the
results
IF S6 = 0 THEN
HIGH 7
ENDIF
FREQOUT 8,1,38500 'sends out signal to IR LED
S8 = IN8 'Stores reply
DEBUG 8,"SENSOR8 = ",DEC S8, CR 'displays the
results
IF S8 = 0 THEN
HIGH 9
ENDIF
FREQOUT 10,1,38500 'sends out signal to IR LED
S10 = IN10 'Stores reply
DEBUG 10,"SENSOR10 = ",DEC S10, CR 'displays
the results
IF S10 = 0 THEN
HIGH 11
ENDIF
FREQOUT 12,1,38500 'sends out signal to IR LED
S12 = IN12 'Stores reply
DEBUG 12,"SENSOR12 = ",DEC S12, CR 'displays
the results
IF S12 = 0 THEN
HIGH 13
ENDIF
FREQOUT 14,1,38500 'sends out signal to IR LED
S14 = IN14 'Stores reply
DEBUG 14,"SENSOR14 = ",DEC S14, CR 'displays
the results
IF S14 = 0 THEN
HIGH 15
ENDIF
PAUSE 1000
LOW 1
LOW 3
LOW 5
LOW 7
LOW 9
LOW 11
LOW 13
LOW 15
GOTO Start
Monday, April 17, 2006
Saturday, April 15, 2006

actual-prototype01
position-a
actual-prototype01
position-b

Image for magazine: Nazli Balkaya, Amy Campos, Claudia Hernandez


Tuesday, April 04, 2006
Monday, April 03, 2006


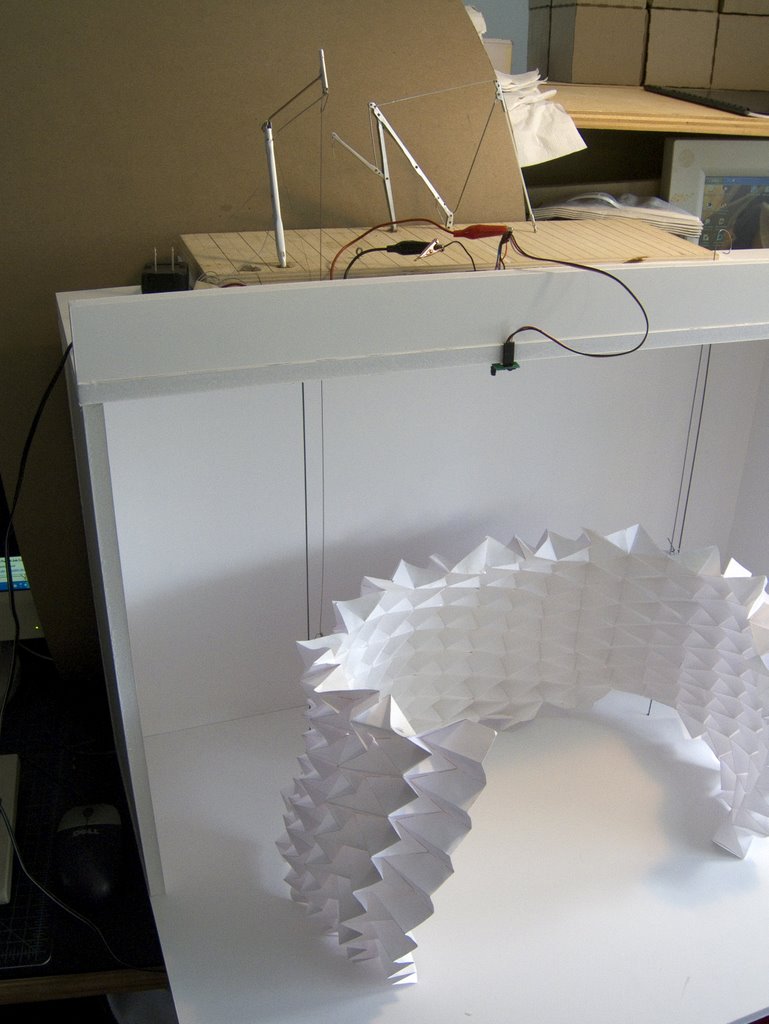
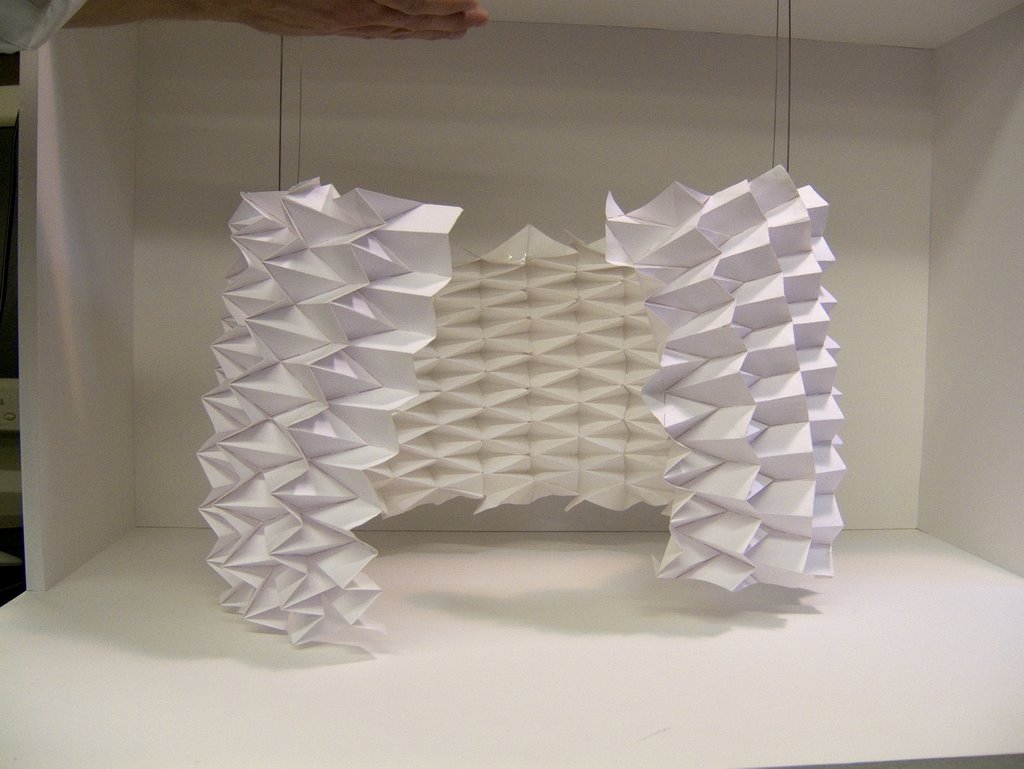
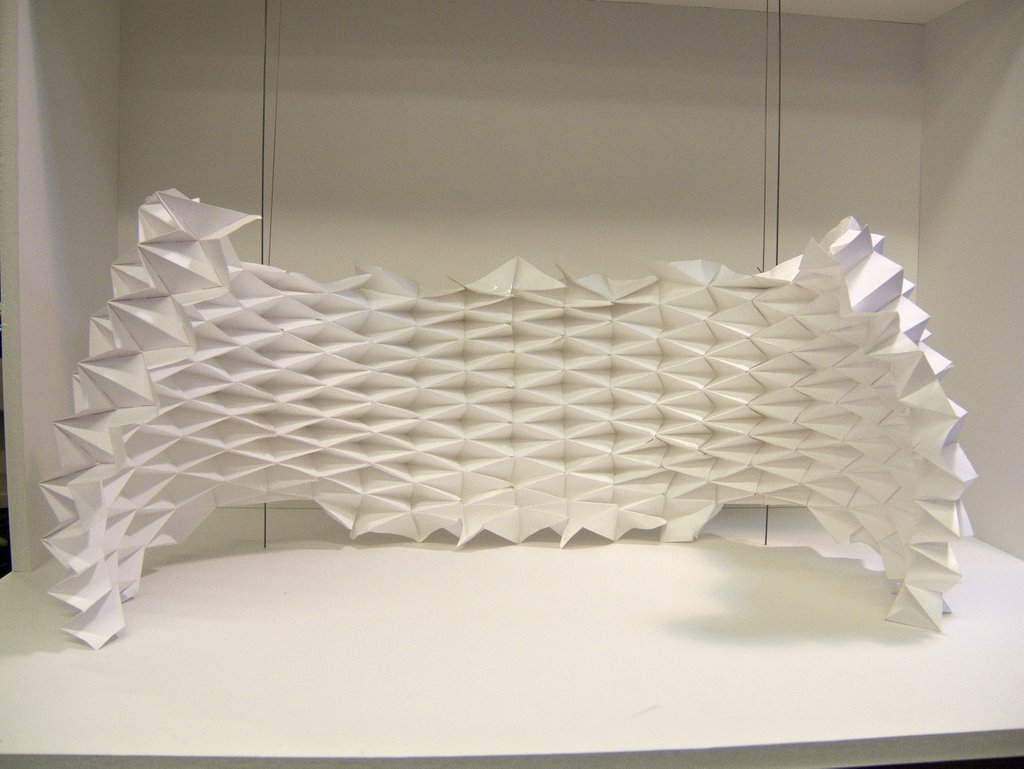
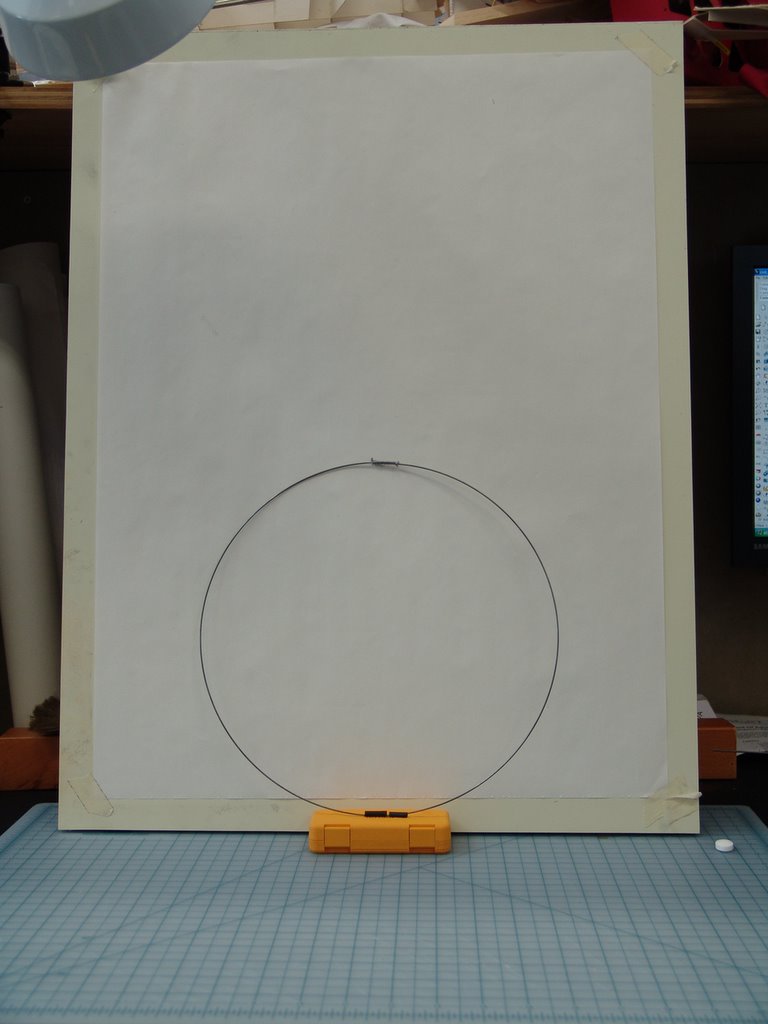
Now that we have the measures and a system that we think will work with enough leverage we are going to build the next prototype on thursday. The wheel will give us the needed cantilever and also isolate the pianowire against the Flexinol wire with the electrical current. The decision to make one end free moving inside a tube resulted from problems with friction in the earlier prototype. Below are some sketches that we made in designing the new prototype. We will need four wires per tile and expect to build a field of six tiles (three operational and three dummies). The setupt will be vertical with a lightsource behind it and a frame surrounding it to block the light from shining around the corners. Exact measures follow on wednesday. We need 8 more Flexinol wires of the type we got in the beginning, so if anybody has any over please contact us.


Monday, March 27, 2006

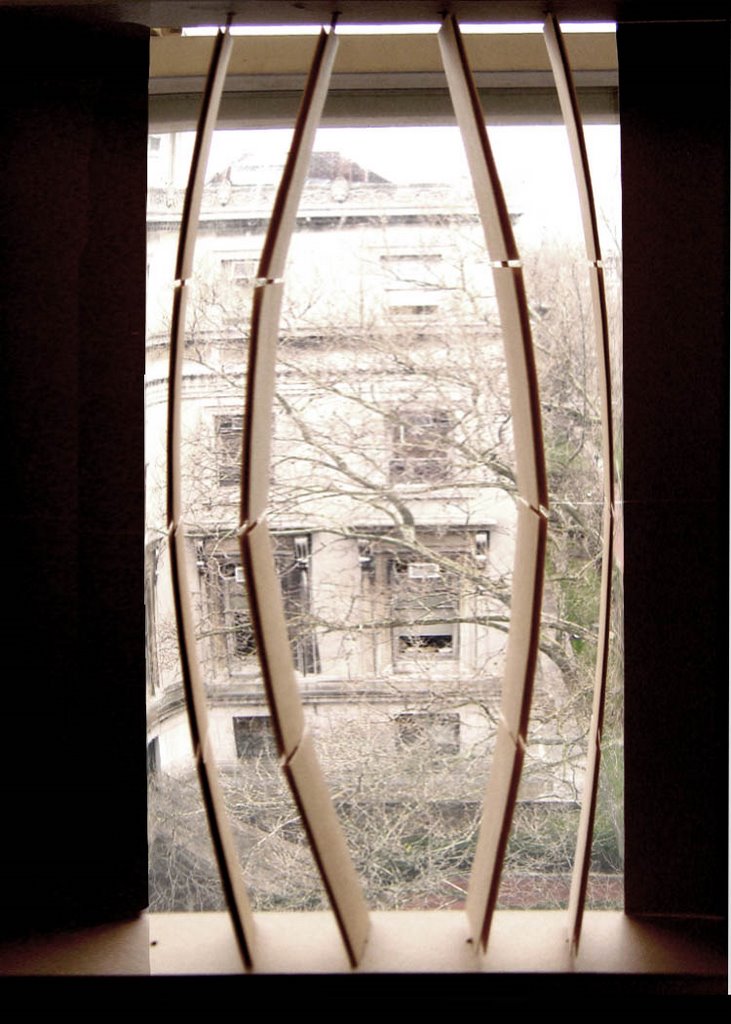
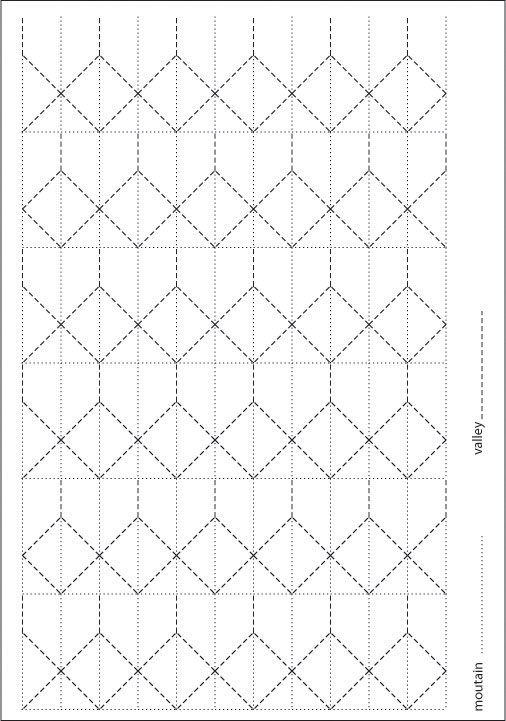
Here is a flattened version that should provide the needed cantilever for the flexinol. Sadly it turned out that piano wire is too fickle in its behaviour to be of much use in a flat shape in this configuration.

The following two images show two experiments to work with the 3d shape and to insert flexible material between the moving parts. The used pantyhose proved to be too sturdy to yield to the pull we exerted and the paperflaps were not to be controlled in a suitable way. So these experiments showed that this was not the way to do it.


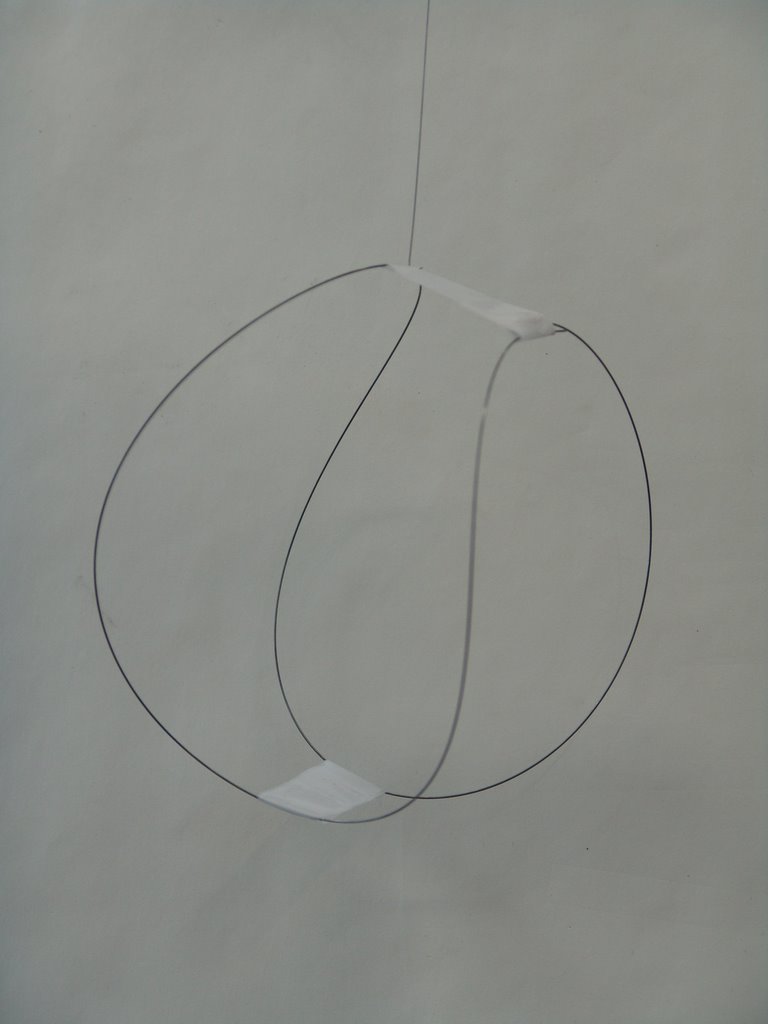
This is the last development and it should be the thing that works. This small prototype is functioning manually but a bigger one is being built at the moment with flexinol to pull up two metal wires that cross in the middle and make the fabric bulge. Through the double aperture on both sides light can shine through the tile. The material that we plan to use will be spandex, black for the outside and white for the inside to better achieve a glow effect once the tile is activated.

Wednesday, March 01, 2006
Johhny & Kent
explain something about how to communicat between Java and Microcontroller
Java:
installation requirement (all from the official website of Java Technology)
J2SE
Java communicatino API 2.0(Javax.comm) for windows- download here. 2.0 for windows version is a little difficult to find online. (new 3.0 only support linux & solar O/S)
Java Media Framework 2.0 (JMF) - for connecting with media device (mic, webcam......)
Microcontroller:
SEROUT - sending data to PC
SERIN - receiving data from PC
please refer to the help file for detail
Because Stamp can't run under multi-threads, it means that the code won't go to next line until it receive any data or reachs the timeover limit.
Therefore, it's a little tricky to use flag to decide when you REALLY want to SERIN to be run.
code:
Java - communication.jar
PBasic - comm.bs2
Book recommendation:
Physical Computing - Classical tutorial book.
Tuesday, February 28, 2006



Monday, February 27, 2006
http://www.thelivingnewyork.com/LivingArchitecture/Jenny+Megan+Bill+Diana/MOV02623.MPG
http://www.thelivingnewyork.com/LivingArchitecture/Jenny+Megan+Bill+Diana/MOV02622.MPG
http://www.thelivingnewyork.com/LivingArchitecture/Jenny+Megan+Bill+Diana/MOV02621.MPG
http://www.thelivingnewyork.com/LivingArchitecture/Jenny+Megan+Bill+Diana/MOV02620.MPG


Saturday, February 25, 2006
http://www.thelivingnewyork.com/LivingArchitecture/KJ+Daniel/LASP06_01_BendingSmallest.mov
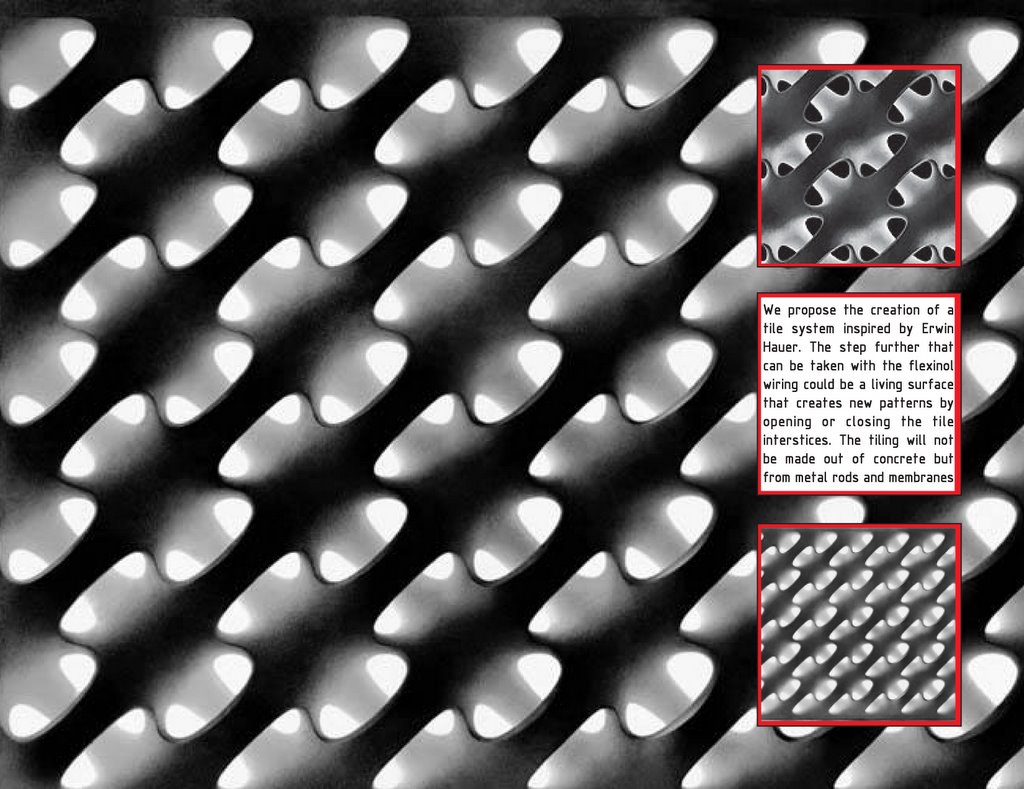
Some images from our experiments on kinetic "Hauer tiles"


http://www.thelivingnewyork.com/LivingArchitecture/Bill+Diana/Protoypes-3and3-2.mov
You can check out work from the Pratt students at:
http://lasp06p.blogspot.com/
http://www.kitsusa.net/phpstore/index.php
You should be able to find the "old" sensor from our Prototype 1 assignement on a variety of other hobby robotics web sites.
Here is one listing:
http://www.hobbyengineering.com/H1469.html
Friday, February 24, 2006
Thursday, February 23, 2006

Wednesday, February 22, 2006
http://www.thelivingnewyork.com/LivingArchitecture/Enrique+Paula/Piezo003.avi
http://www.thelivingnewyork.com/LivingArchitecture/Enrique+Paula/Piezo004.avi
HEY, GUYS... THIS BLOGGER DOES NOT HAVE A TITLE SECTION FOR WHATEVER REASON, SO HOW ABOUT WE KEEP THE FIRST LINE OF THE POSTING ALL CAPS, 'LARGE' FONT SIZE AND BOLD... SO THAT IT IS EASIER TO LOOK UP LATER?
SOO-IN
version 2.2
http://www.parallax.com/dl/docs/prod/stamps/web-BSM-v2.2.pdf
http://www.thelivingnewyork.com/LivingArchitecture/Amy+Nazli+Claudia/21feb06_2.MOV
Sunday, February 19, 2006

Saturday, February 18, 2006
http://www.thelivingnewyork.com/LivingArchitecture/Bill+Diana/BADM-prototype-2.mov
Tuesday, February 14, 2006
We used the thinnest wire(red one) for connections.
To strip the ends, you can burn them with a lighter.
Local Radioshack usually has some in stock.
http://www.radioshack.com/product/index.jsp?productId=2036277&cp=2032058&pg=2&f=Taxonomy%2FRSK%2F2032058&categoryId=2032058&kw=coil&kwCatId=2032058&parentPage=search
http://www.thinkgeek.com/gadgets/lights/5a9f/
http://www.sportys.com/acb/showdetl.cfm?Product_ID=9482&DID=19
This one is very interesting. It has a rechargeable battery and a plug at the bottom for an adapter.
http://www.the-gadgeteer.com/review/gadget_brando_battery_free_flashlight_review
RainScreen WEEK03: JASON + BILLY
Living Architecture
Responsive Kinetic Systems Lab
02/14/06


Monday, February 13, 2006

http://www.arcspace.com/architects/nox/d_tower/index.htm
http://www.ambientdevices.com/cat/orb/orborder.html
Sensor:
http://www.cs.cmu.edu/~cmucam/home.html
http://www.acroname.com/robotics/info/examples/cmucam-1/cmucam-1.html
Saturday, February 11, 2006
(AMY + NAZLI + CLAUDIA)
http://www.loove.org/remotehome/lonelyhomeLondonVideo.htm
Friday, February 10, 2006
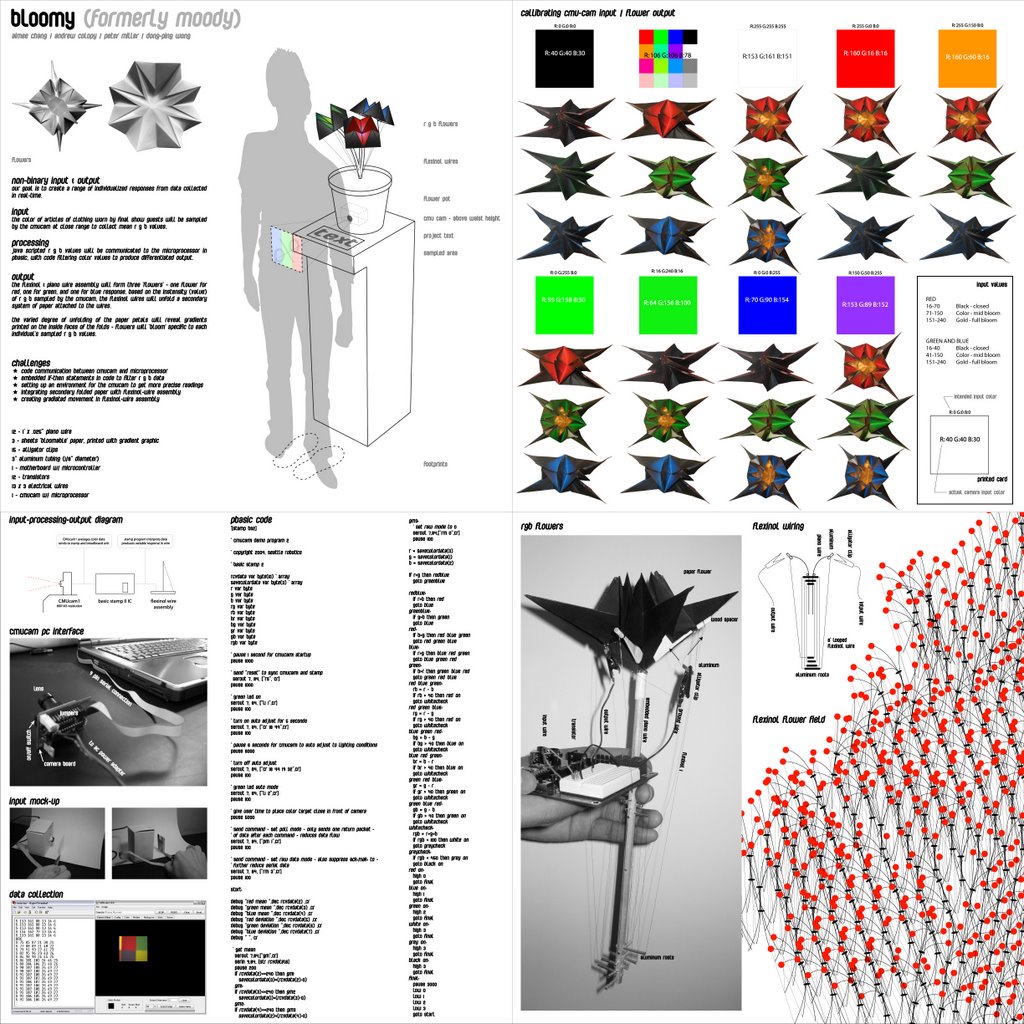
(in partnership with Peter Miller + Dong-Ping Wong)
Agenda: Mood
Mood conveys information – about an individual, about an individual in relation to a larger group, and about cultural values. We intend to take the concept of a mood ring and apply it to a spatial response – that an individual’s “mood” can animate architecture and that the amount of movement communicates what that mood is.
The mood ring measures mood through body temperature. Here, mood will be measured through color input with the idea that the colors you wear are indexes not only of an individual mood, but also of social custom and cultural tendency. For example, do architects at the final show mostly wear black? Can this project actually produce a mood? Might architects begin to question their choice in clothing relative to our larger culture?
Guidelines:
Movement occurs in a field rather than a surface
The field is a registration/index of an individual, producing unique output
Movement produces shifts in color/density as a registration of mood
Output is an abstraction rather than equivalent representation
Produce a catalogue of collective responses, preferably through the same medium
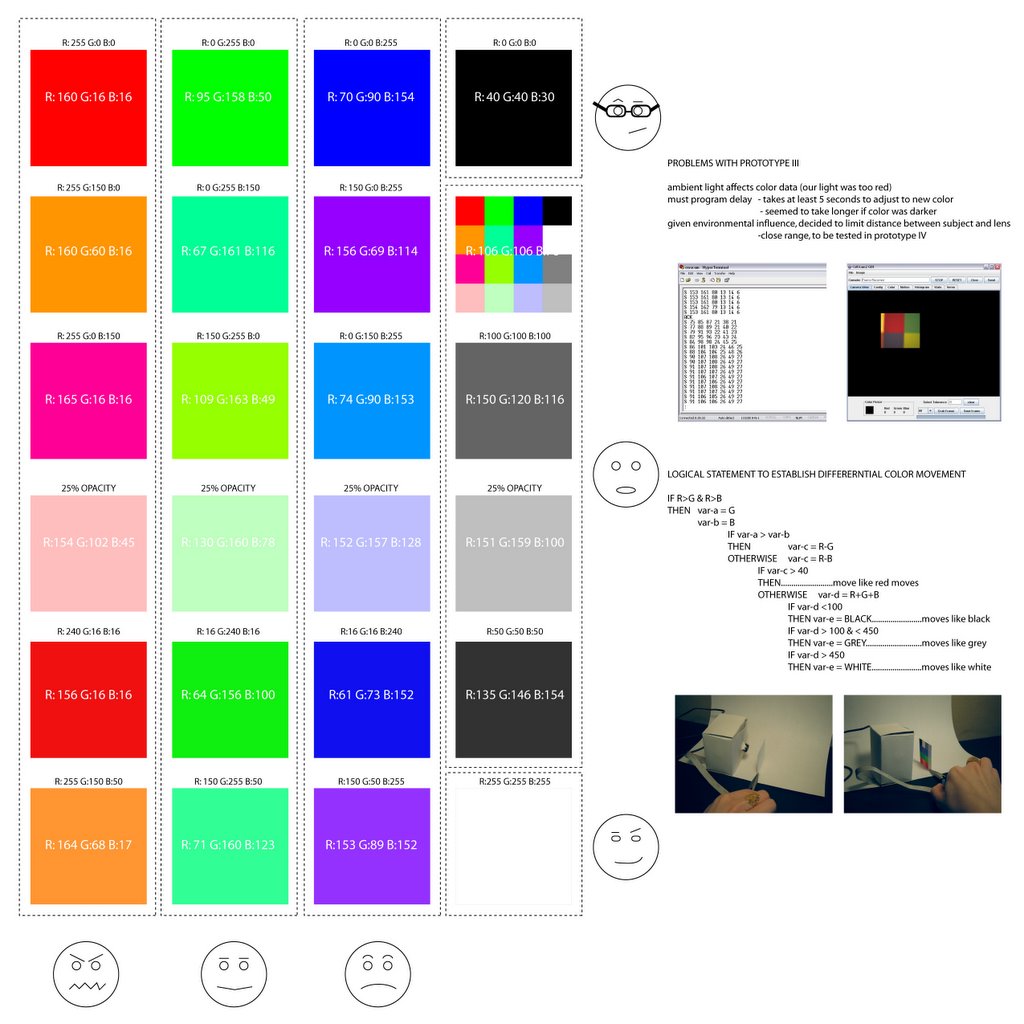
RESEARCH PROPOSAL: NON-BINARY INPUT DEVICES
Research sensors that detect color to produce a differentiated response in the movement of the piano wire as a result of the processing code.
Initial Prototyping Goal:
Understand the way in which the sensor receives input and the code required to process variable rather than binary input.
When a black piece of paper is placed in front of the color sensor, little movement occurs in the piano wire. When a white piece of paper is placed in front of the color sensor, the piano wire moves a greater amount.
Research Contribution Goal:
UN Studio has spatialized information through printed graphics. However, this production was only a representation, fixed in both space and time.
Our project seeks to move beyond static representation by utilizing physical space to convey information collected and updated in real-time.
Wednesday, February 08, 2006
(MEGAN + JENNY)
http://www.thelivingnewyork.com/lab/full_length_reciprocalspace.mov
http://scientificsonline.com/article.asp?ai=117&sid=edsci&cm_mmc=edsci-_-link-_-na-_-home&bhcd2=1139435517
(DANIEL + KJ)
http://www.rpi.edu/dept/NewsComm/Magazine/fall03/feature1-3.html
(JOHNNY + KENT)
Check out Live Wire as well as all the other cool projects.
http://xdesign.ucsd.edu/
(BILL + DIANA)
http://crenshaw.cc.columbia.edu/cgi-bin/Pwebrecon.cgi?v1=1&ti=1,1&Search%5FArg=BROWN%2C%20HENRY%20T%2E&SL=None&Search%5FCode=NAME%5F&CNT=50&PID=13367&SEQ=20060208162747&SID=3
(JENNY + CARMEN + NANCY)
http://www.theverylastpageoftheinternet.com/
Monday, February 06, 2006
Living Architecture: Responsive Kinetic Systems Lab
02/07/06

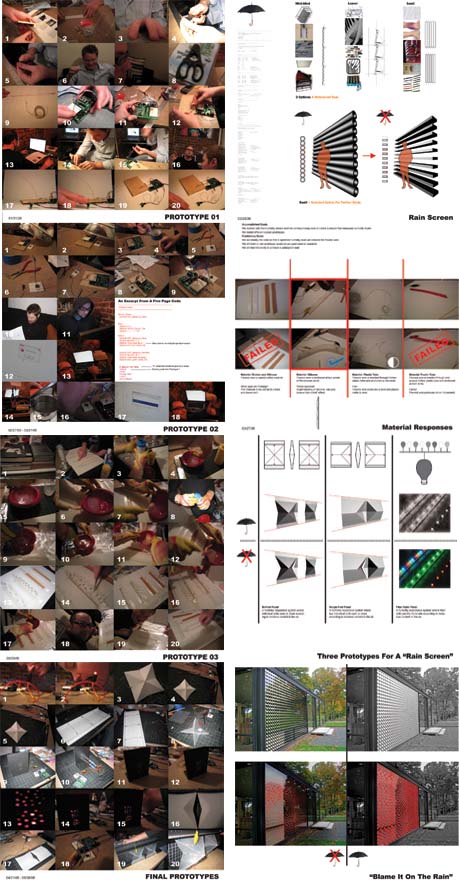
RainScreen
We will take as our starting point the static screen.
We will construct a kinetic rain screen system.
We define a kinetic rain screen as a non-structural system that offers natural ventilation, based on moisture sensory, with the ability to create a water tight seal.
We will take as our starting point Prototype 07.
We will test materials.
We will test size.
We will test form.
We will test performability.
We will test aperture.
We will test the ability to achieve a waterproof seal.
We will build it as well as computer models and diagrams.
Relevant Websites:
www.bmwusa.com
http://www.sial.rmit.edu.au/Projects/Aegis_Hyposurface.php
http://lowtech.propositions.org.uk/
http://www.viracon.com/index.php
http://www.sensorland.com/HowPage029.html
http://content.honeywell.com/sensing/prodinfo/humiditymoisture/
Books:
Transmaterial
Smart Materials and Technologies in Architecture
4d: Interactive Architecture (Architecture Design Magazine)

2.0 Research Topic Proposal
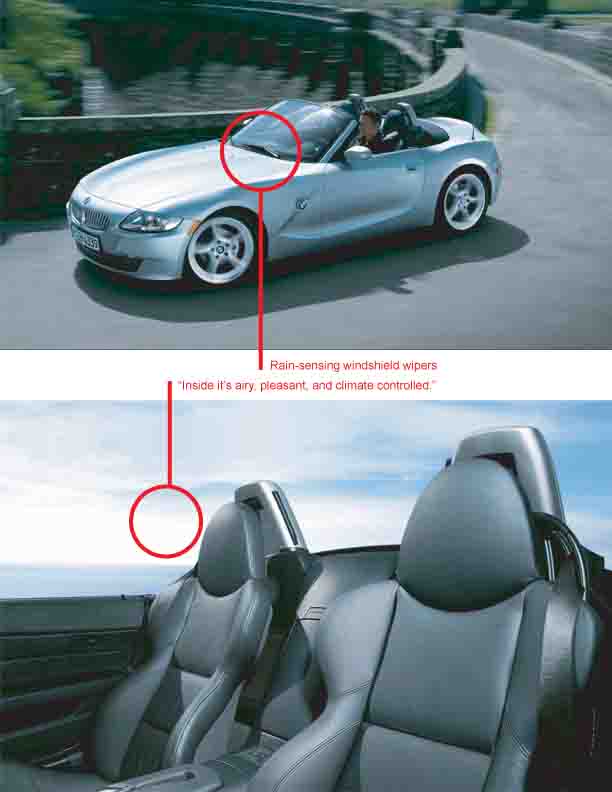
We intend to focus our research on physically amplified output. The following example of responsive kinetic architecture is achieved with much expense and effort. It’s effects are largely imagistic, in that it operates as a three-dimensional billboard. Because of the nature of its mechanisms and construction, it cannot bear any load on any of its surfaces, rendering it decorative rather than architectural.
Beyond imagistic effects, Team Arbizu+Martinez aspires to a truly integrated and functional architectural module.
One potential application is a wall section that responds to the transient needs of subway commuters. These spaces are subject to various states of congestion and speed. This program in a state of constant flux requires an architecture of extreme flexibility. We seek an architecture that can both dodge mad commuters and offer weary travelers a state of repose.
Potential Advisors:
Fidel Arbizu Jr. – Electrical Engineer
Columbia University Mechanical Engineering Department
Fred Blumlein – Industrial Designer
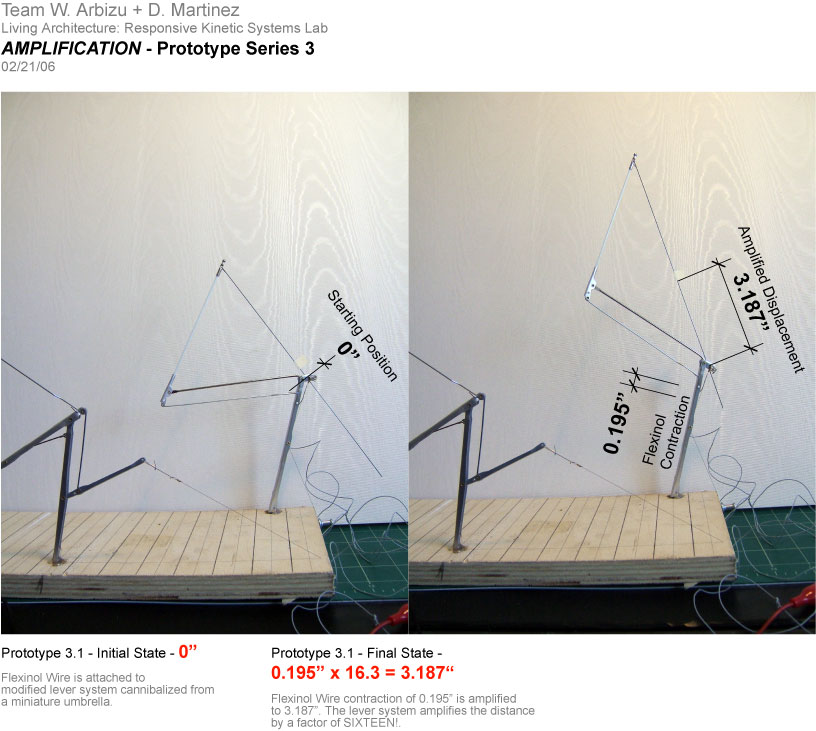
First Experiment and Prototype
Design and test mechanical systems that will amplify the distance that the flexinol wire moves.
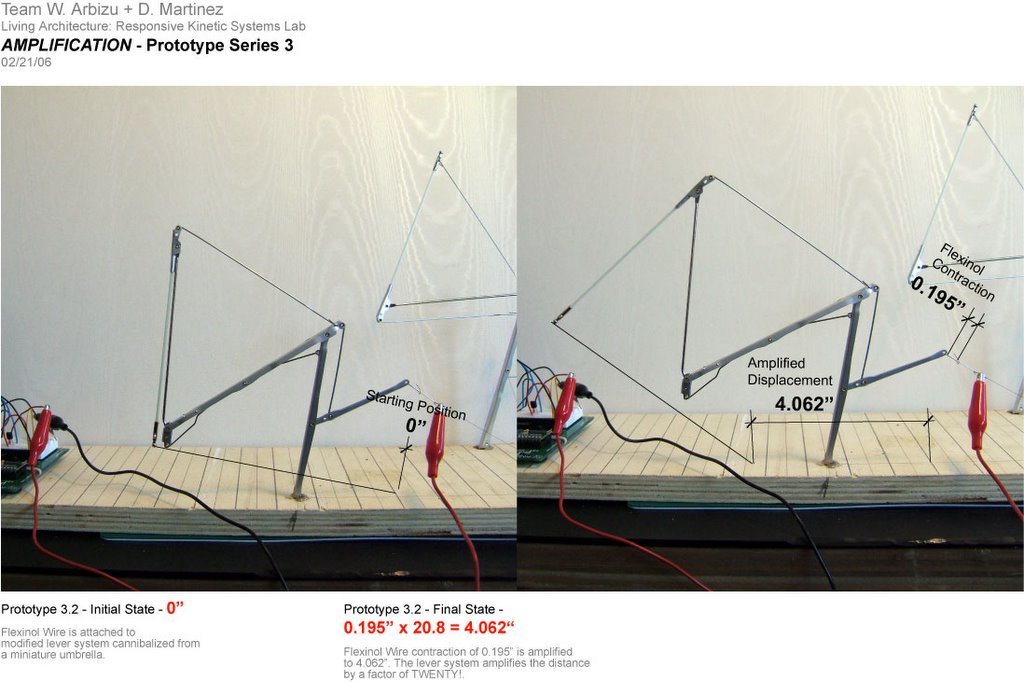
Team W. Arbizu + D. Martinez
Living Architecture: Responsive Kinetic Systems Lab
Research Proposal – (Draft 02/06/06)
1.0 Research Agenda
AMPLIFICATION
Our intent is to amplify the scale of movement achieved with the current flexinol assembly. The flexinol wires currently create a scale of movement suitable to product design and small scale architectural elements.
SCALE
We intend to create a mechanical system that takes the original dimension of movement generated by the flexinol assembly, and amplifies it to a more robust architectural scale.
MECHANICS
Using the flexinol wires as muscles, we will explore the potentials of gear-transfer mechanisms, pulley and lever-based assemblies in augmenting the scale of movement.
MECHANUS MINIMUS
We intend minimize both the appearance and the complexity of the amplification mechanisms.
Sunday, February 05, 2006
INSPIRATION: STREAMSIDE DAY FOLLIES
by Pierre Huyghe
http://www.stage-directions.com/articles/dia.shtml
TIP: PIR SENSOR SCRIPT
From Johnny and Kent
script: for the people who have the new sensorsteps:-move P2 wire to P10-run the new script-wait 20 sec for it to warm up, and be very still for the 20 sec for it toread the environmentdownload the script here :http://www.comixbook.com/upload/Uploads/prototype01_03.rar
Friday, February 03, 2006
http://www.media.mit.edu/physics/pedagogy/fab/fab_2002/help_pages/joepelectronicsprimer.htm
INSPIRATION: OMNIVISU
http://www.designberuehrtherz.de/projects.php?stud=19&proj=3&img=1&lang=de
http://www.arch.kth.se/a-url/
Check out Terrarizer, Lemon Concerto, and Mediated Spaces (http://www.arch.kth.se/mediatedspaces/)
Thursday, February 02, 2006
Japanese EAP company
http://www.thelivingnewyork.com/lab/kurage.wmv
http://www.eamex.co.jp/index_e.html
EAPs in general have a wide range of motion. It can also be more precisely controlled.
It's strength at this moment is significantly weaker than SMAs. (Shape Memory Alloy, like Flexinol)
The first world arm wrestling challenge between human and robots using EAP actuated artificial muscle was held last year. This may indicate improvements in the strength of EAPs.
Wednesday, February 01, 2006
http://www.thelivingnewyork.com/lab/LivingArch-Columbia-ResearchTopic.pdf
by Usman Haque and Adam Somlai-Fischer
http://lowtech.propositions.org.uk/
INSPIRATION: SOLAR YARD LIGHT
Inexpensive off-the-shelf prduct that has a 'logic module' already set up. Could be interesting to hack into.
http://www.solarilluminations.com/acatalog/solar_floating_light.html
How solar yard light works
http://home.howstuffworks.com/solar-light.htm
http://www.digikey.com/
http://www.junun.org/MarkIII/Store.jsp
http://science.howstuffworks.com/question363.htm
http://www.lce.hut.fi/publications/annualrep/node21.html
INSPIRATION: MICHAEL A. FOX ROBOTECTURE
http://robotecture.com/index.php?option=com_simpleboard&Itemid=40
Directed by Kas Oosterhuis
http://www.bk.tudelft.nl/live/pagina.jsp?id=f878960b-0ab5-4a32-bbe6-4e5e7e903887&lang=nl
POSSIBLE TOPIC FOR ADVANCED RESEARCH (OUTPUT): EAP
EAP Article in Wired
http://www.wired.com/wired/archive/12.03/start.html?pg=13
Manufacturer of EAP
http://www.environmental-robots.com/
TUTORIAL: BASIC TERMS OF MAGNETIC AND ELECTRIC ENERGY
\http://www-istp.gsfc.nasa.gov/Education/FAQs2.html#q28
TUTORIAL: MUSCLE WIRE PROJECT BOOK
by Roger G. Gilbertson
http://www.amazon.com/gp/product/1879896133/104-5247449-7695906?v=glance&n=283155
Tuesday, January 31, 2006
http://www.parallax.com/dl/src/prod/PIR-Demo-Code-V1.0.zip
http://www.parallax.com/dl/docs/prod/audiovis/PIRSensor-V1.1.pdf
http://www.scary-terry.com/itw/pirsensor/pirsensor.htm
Friday, January 27, 2006
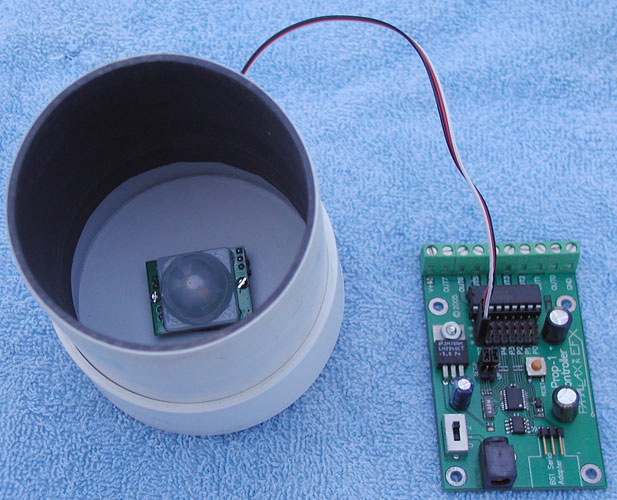
Hi, all
I think the most difficult part is "wiring" and I attached colorphoto for wiring reference.On the manual, "Identify" and "Run" means to click on the icons.When you look at command pannel carefully, there is a little graybutton with letter "ID" and Blue triangle is to "Run" Just clickclick.You are also welcome to come to my desk (600N - on your right andthere is 2 white clamp on desk lamp) and look at finished kit.I hope this can help a lot.
Best,
KJ and Daniel

![]()